

Among individuals with unilateral lower-limb amputations, the sound side limb is called upon to bear a disproportionate amount of each day’s ambulatory activities. However, the load can be reduced by certain prosthetic foot designs. This article explains the role of prosthetic foot choice in sparing the sound side limb. The inverted pendulum model is introduced to explain the importance of mimicking push-off to redirect the body’s center of mass (COM) prior to the loading of the sound side limb. Within this model, the effectiveness of conventional energy-storing feet (ESF), a prototype passive foot with targeted energy release, and the externally powered BiOM foot are discussed relative to their ability to spare the sound side limb from undue impact forces.
The Inverted Pendulum Model
Designing an optimal lower-limb prosthesis begins with an accurate modeling of human locomotion. One of the more convincing, intuitive models is described by Arthur Kuo, PhD, and Maxwell Donelan, PhD, in their article “Dynamic Principles of Gait and Their Clinical Implications.”1 The authors provide a thorough and engaging explanation of the Inverted Pendulum Model, in which the stance leg is likened to an inverted pendulum with its fulcrum at the stance foot. Within this model, walking is seen as a sequence of efficient pendulum swings, alternating from one stance limb to the other (Figure 1).
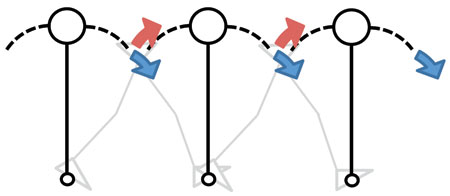 Figure 1
Figure 1
The model helps explain the relative efficiency we enjoy in upright ambulation, but it creates a fundamental concern. To quote the authors: “A consequence of pendulum-like motion is that the transition to a new stance leg requires redirection of the COM velocity from one inverted pendulum arc to the next.” As seen in Figure 1, following the arc of the inverted pendulum, the vector of the body’s COM at the conclusion of a given step is forward and down (as indicated by the blue arrows).
However, the corresponding arc of motion for the leading limb at the moment of transition from one stance limb to the other is characterized as forward and upward (as indicated by the red arrows). The impact of this need to redirect the body’s motion is aptly described by returning to the authors’ narrative: “Although previous studies recognized that some form of redirection was necessary, the dynamic walking approach explicitly modeled the redirection as a collision and showed how it dissipates energy. The ground reaction force (GRF) of the leading limb is oriented partially in opposition to the COM velocity and performs dissipative negative work on the COM as a result, which necessitates positive work to compensate for the dissipation.”
Step-to-Step Transition
Any talk of a “collision” in what we generally perceive to be a fluid process is a bit alarming. How does the body manage these cyclical collisions? Kuo and Donelan explain:
“Negative work can be reduced in an ideal dynamic walking model by pushing off with the trailing limb in a brief preemptive impulse just before the leading-limb collision. Such a push-off reduces the collision velocity and, therefore, the amount of work that must be performed…. Empirical observations have shown that people who are healthy perform step-to-step transitions in this manner. They perform positive mechanical work on the COM with the trailing leg, beginning just before and continuing throughout double-limb support.”
In layman’s terms, at the end of each step, the body is falling forward, following the arc of an inverted pendulum. If the trajectory of the COM is unaltered, there is a sizeable collision as the leading leg accepts the body’s weight at the end of the fall. This collision is routinely mitigated during healthy ambulation by a precisely timed push-off event from the trailing limb that occurs just prior to the heel strike of the leading limb. This redirection spares the leading limb from excessive impact and reduces the collisions that would otherwise occur with every step.
Prosthetic Implications
Within this modeling approach, there is cause for considerable alarm within the prosthetic community. With a few exceptions, some of which will be described in greater detail later in this article, lower-limb prostheses don’t generally provide the necessary push-off to adequately redirect the body’s COM and spare the sound side limb from the cyclical collisions of ambulation. However, there is evidence to support the notion that, to the extent that lower-limb prostheses are able to replicate push-off, they are able to reduce the impact loads experienced by the sound side limb during loading response.
Energy-Storing Feet
Beginning with the Model & Instrument Works Seattle Foot in 1981, the principle of energy storage entered prosthetic design. The Delrin® acetal homopolymer keel of the foot deflects through mid- and late-stance, effectively storing potential energy. At the end of each step, the foot returns to its original shape, which releases the stored energy and mimics, to a small extent, the physiologic push-off. Subsequent foot designs have followed this model. In 1987, the second generation of ESF began with the introduction of the Össur Flex-Foot®. In this revision, deflective materials now comprised the shank, toe, and heel of the foot, which allowed for more energy storage and more energy return.

The inverted pendulum theory, with its emphasis on the collisions inherent in the step-to-step transitions, helps explain one of the best-documented benefits associated with ESF. In their article on energy storage and response prostheses, Hafner et al. review the documented benefits of ESF and conclude that, perhaps surprisingly, these benefits are rather limited in the realm of self-selected walking speed.2 Summarizing the early literature on ESF, Hafner et al. report that the majority of the examined studies showed that foot type does not significantly affect self-selected walking speed. In fact, only one of the nine examined velocity studies found a statistically significant increase in walking velocity. ESF did increase walking velocity, however, in the majority of the studies the amount of improvement (on average less than 5 percent) failed to reach statistical significance.
In contrast, the effect of these feet in decreasing the magnitude of the peak vertical forces acting upon the sound side was more consistent.2 For first-generation ESF, this improvement was generally characterized by a modest decrease of about 5 percent. However, early studies on second-generation ESF, specifically the early Flex-Foot design, saw the magnitude of these forces decrease by almost 20 percent.2 The industry’s modest early successes in replicating push-off has led to a partial sparing of the sound side limb from the full force of cyclical step-to-step collisions.
Controlled Energy Storage and Return
This principle received greater scrutiny in a recent study conducted in collaboration with the U.S. Department of Veterans Affairs and the University of Washington, Seattle.3 The study involved the examination of three prosthetic feet: a conventional foot, represented by the Seattle LightFoot2; each patient’s prescribed foot (generally second-generation ESF or Flex-Foot-type feet); and a controlled energy storage and return (CESR) foot. The authors describe the CESR foot as “an energy recycling foot that is designed to increase prosthetic ankle push-off as compared to conventional prosthetic feet.” The foot features a spring mechanism that captures energy at heel strike and stores it until later in stance phase when a latch opens and the stored energy is released into push-off. Citing earlier work, the authors assert that with the CESR foot, study subjects were able to nearly double the peak push-off power compared to the conventional foot.3

A number of study subjects with transtibial amputations were examined in the gait lab as they walked in each of the three feet; kinematic and GRF data were collected. Consistent with the authors’ hypothesis, there were considerable differences in the average amount of push-off work performed when using each of the three foot types. When using the CESR foot, with its targeted duplication of a propulsive push-off, study subjects experienced 68 percent more push-off work than when using their prescribed feet, and 137 percent more work than when using the conventional foot.3
In addition to measures of the trailing prosthetic limb, the authors recorded the peak impact forces experienced by the leading sound side limb during the step-to-step transition. Recorded as the peak external knee adduction moment, this resultant force was decreased by 16 percent with the subjects’ prescribed foot compared to the conventional foot, and by 26 percent with the CESR foot.3 Progressively greater successes in duplicating push-off forces resulted in progressive sparing of the sound side limb.
Externally Powered Propulsive Prostheses
Given the observations cited previously, it seems intuitive to suggest that similar benefits in sound limb sparing might be observed with today’s externally powered prostheses, which are capable of generating a truly propulsive push-off. A recently published study confirms this relationship.4 In the study, seven subjects with transtibial amputations were evaluated with their legacy prosthetic feet (generally dynamic pylon, Flex-Foot-type feet) and the BiOM. Unlike the feet discussed up to this point, the BiOM draws power from an external battery and generates positive, propulsive work during gait, which simulates push-off.
The subjects, along with seven matched able-bodied subjects, were asked to walk with a range of speeds, including 0.75, 1, 1.25, 1.5, and 1.75 meters per second (m/s). This test revealed that the ankle angles at moment of toe-off along with the peak ankle power were strikingly similar for the individuals with limb loss and the able-bodied subjects across the range of gait speeds.4 This data suggests that the BiOM is able to accurately mimic the range and power of the anatomic ankle at push-off.
So how did this affect the peak GRF experienced by the sound side limb? At 1.5m/s, a speed that closely approximated the self-selected walking speeds of subjects wearing the powered BiOM technology, the average peak GRF experienced by the sound side leg with the use of each individual’s legacy prosthetic foot was 12.77N/kg, or about 10 percent higher than the forces experienced by the able-bodied controls. By contrast, with the use of the BiOM, the average peak GRF was reduced to 11.41N/kg, or about 1.5 percent less than that experienced by able-bodied ambulators.4
When examining the peak external adduction moment acting upon the knee, the same variable considered earlier in the Seattle study, the trends were equally encouraging. When walking with their legacy prosthetic feet at 1.5m/s, the subjects’ average peak adduction moment acting upon the knee was 0.61Nm/kg, 39 percent higher than the average moment experienced by able-bodied walkers (0.44Nm/kg). With the BiOM foot, this moment decreased to an average of 0.49Nm/ kg. While still 11 percent higher than that experienced by able-bodied controls, this represents a 21 percent decrease in this moment among the subjects with limb loss compared to those moments experienced with their legacy prosthetic feet.4
Summary
The risk of overuse of the sound side limb in individuals with lower-limb amputations is well understood within the field of prosthetics. Struyf et al.’s 2009 study found that symptomatic osteoarthritis of the knee is 17 times more likely in age-matched people with lower-limb amputations than the able-bodied population. Similarly, osteoarthritis of the hip was observed to be approximately 14 times more likely in age-matched individuals with lower-limb amputations. While there are certainly a number of underlying factors and day-to-day usage patterns that influence these numbers, the lack of an adequate prosthetic push-off obviously contributes to these overuse trends. However, there is an emerging body of evidence to suggest that the more prosthetic foot and ankle mechanisms are able to replicate the active push-off of the anatomic ankle, the greater the reduction of the collision forces experienced by the sound side limb during the step-to-step transitions.
Phil Stevens, MEd, CPO, FAAOP, is in clinical practice with Hanger Clinic, Salt Lake City, Utah. He can be reached at philmstevens@hotmail.com
References
- Kuo, A. D., and J. M. Donelan. 2014. Dynamic principles of gait and their clinical implications. Physical Therapy 90 (2):157-74.
- Hafner, B. J., J. E. Sanders, J. M. Czerniecki, and J. Fergason. 2002. Energy storage and return prostheses: Does patient perception correlate with biomechanical analysis. Clinical Biomechanics 17 (5):325-44.
- Morgenroth, D. C., A. D. Segal, K. E. Zelik, J. M. Czerniecki, G. K. Glute, P. G. Adamczyk, M. S. Orendurff, M. E. Hahn, S. H. Collins, and A. D. Kuo. 2011. The effect of prosthetic foot push-off on mechanical loading associated with knee osteoarthritis in lower extremity amputees. Gait & Posture 34 (4):502-7.
- Grabowski A. M., and S. D’Andrea. 2013. Effects of a powered ankle-foot prosthesis on kinetic loading of the unaffected leg during level-ground walking. Journal of NeuroEngineering and Rehabilitation 10:49.
- Struyf, P. A., C. M. van Heugten, M. W. Hitter, and R. J. Smeets. 2009. The prevalence of osteoarthritis of the intact hip and knee among traumatic leg amputees. Archives of Physical Medicine and Rehabilitation 90 (3):440-6.


