Researchers in China developed a method for improved tactile myoelectric prosthetic hands in handling tools. The participants with amputations reported less fatigue when completing tasks with the research model.
“Human hands rarely drop tools because our brain continuously adjusts grip force based on tactile and kinesthetic feedback,” said Bin Fang, PhD, a professor in the School of Artificial Intelligence at Beijing University of Posts and Telecommunications, and coauthor of a paper on the development. “We wanted to give prosthetic hands the same ability.”
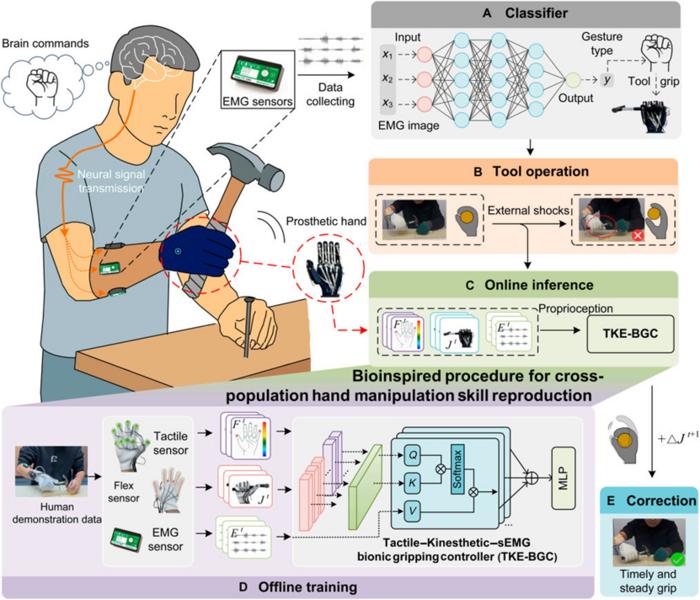
The team designed a multimodal controller called the Tactile, Kinesthetic, and EMG Bionic Gripping Controller (TKE‑BGC) that integrated three streams of information: surface electromyography (EMG) signals from the user’s residual muscles, tactile contact forces, and joint angles (kinesthetic data).
To train the controller, able‑bodied participants wore a data glove with embedded tactile sensors and bend sensors, plus three EMG electrodes. They performed two tool tasks, hammering nails and sawing wooden strips, to provide a dataset of how a natural hand responds to rigid impacts and varying loads. The TKE‑BGC model uses a transformer encoder to fuse the multimodal inputs and a multilayer perceptron to predict the next joint angle adjustments in real time.
“The key innovation is that tactile and joint information act as a query to ‘weight’ the EMG features via cross‑attention,” said co‑author Boao Li, PhD.
The team compared TKE‑BGC against two conventional strategies: fixed force (FiF) and force follows (FoF). FiF applies a constant preload; FoF adjusts grip force based on real‑time load measurements but suffers from delays and over‑compensation.
Online experiments involved six able‑bodied participants wearing an extended limb and three participants with transradial amputations. They performed four tool tasks: two “seen” (hammering, sawing) and two “unseen” (peeler operation, desktop organization). For each task, participants used all three control methods in random order.
TKE‑BGC significantly reduced the number of tool drops in every task and shortened completion times. In hammering, for example, FiF and FoF caused multiple drops, while TKE‑BGC kept the tool secure. Equally important, the researchers said, the average contact force with TKE‑BGC closely matched that of a natural human hand, whereas FiF and FoF exerted either too little or excessive force. EMG amplitude analysis showed that TKE‑BGC required much lower muscle activation than FiF and FoF (average EMG amplitude 0.0023 versus 0.0124 for FoF).
Integrated EMG, which reflects overall muscle fatigue, was also lowest for the proposed method.
“Amputees reported that they felt less exhausted and could complete tasks more naturally,” said co‑author Shuhui Wu, PhD.
Crucially, TKE‑BGC generalized well across subjects and tasks. Despite being trained on data from a single able‑bodied participant, it performed consistently for all the participants. It also transferred to the unseen peeler and desktop tasks without retraining, demonstrating strong task generalization.
“This work moves prosthetic hand control from static grasping to real‑world tool handling,” said Fang. “By transferring human manipulation skills through a multimodal, attention‑based controller, we can help amputees not only with daily living but also with vocational rehabilitation and returning to work.”
The open-access study, “Dynamic manipulation skill learning for tactile myoelectric prosthetic hands in tool handling,” was published in Cyborg and Bionic Systems.