Location and naming convention of the [handshake] force sensors on the hand (a) On the surface of the palm and (b) Back of the hand. Photographs courtesy of Cabibihan et al., Journal of NeuroEngineering and Rehabilitation, 2011 8:16.
A recent study published in the Journal of Neuroengineering and Rehabilitation has focused on replicating the softness of the skin tissue on the human hand during social touching interactions. Particularly, different contact forces made on synthetic finger phalanges were investigated with the goal to replicate the skin tissue displacement of human finger phalanges that is felt during handshakes and light touches. The results have implications for the development of prosthetic hands and arms with lifelike appearance and softness.
To find out how to make prosthetics feel more real to the touch, a research team led by John-John Cabibihan, PhD, assistant professor in the Department of Electrical and Computer Engineering (Controls, Intelligent Systems and Robotics Group) and the Social Robotics Laboratory (Interactive and Digital Media Institute), National University of Singapore, examined various new and old prosthetic configurations of synthetic finger phalanges for their “skin compliance behavior.”
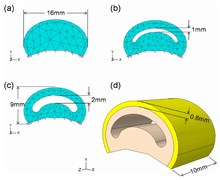
Geometries of the 3D finite element model. (a) Solid internal geometry. Internal geometry pockets of (b) 1 mm and (c) 2 mm heights. (d) The finite element model showing the two material layers.
Handshake tests were performed-where volunteers shook hands while wearing sensors over their skin- to identify which areas on the human hand experience high contact forces. After these areas were determined, researchers used an indenting probe on select areas of the fingers-little, ring, and middle-to obtain force-displacement curves. Finite element simulations were then used to compare the force-displacement results of the synthetic finger phalanx designs with that of the experimental results from the human hand and prosthetic hands made of silicone or polyurethane.
The researchers found that the best phalange designs were structured in multiple material layers-a stiff external layer can better protect the tactile sensors and electronics that may be embedded on the internal structure, while the soft internal layer can satisfy the requirements for the sensation of a more natural social touch. They also found that internal air pockets can significantly improve the compliance of the synthetic skins that will be used for prostheses.