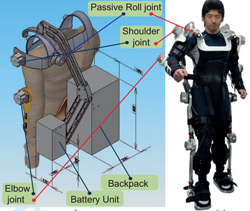
The CAD drawing shows the battery and the backpack unit that includes all of the electronics (motor drives, data-acquisition boards, and the main central processing unit).
Photograph courtesy of Barkan Ugurlu.
A team of researchers in the Control Systems Laboratory, Department of Advanced Science and Technology, Toyota Technological Institute, Nagoya, Japan, have recently unveiled a new exoskeleton that was designed as a multipurpose assistive device that can be used for both power augmentation and passive and active robotic rehabilitation tasks.
While the overall mechatronic hardware was built several years ago, the control algorithm and software that is being used was built recently.
According to Barkan Ugurlu, PhD, who is co-leading the research activities, there are three design objectives: that the exoskeleton is multipurpose, wearable and lightweight, and inexpensive to manufacture. To address wearability and weight, the researchers used laser molded resin in the upper body. The overall system can be worn by an individual and it has adjustable link lengths to accommodate varying wearer heights, said Ugurlu. To contain costs, Ugurlu said they kept the exoskeleton design simple. The system is actuated via electrical motors, and the control algorithm is built on top of a sensorless architecture. The researchers also used off-the-shelf joint-level compensation and control techniques that are already in the manufacture of robots and robotic devices.
While clinical experiments have not been performed, the system performance has been tested with able-bodied individuals, as well as with individuals who are obese and who are underweight. The system performance is not easily influenced by human-wearer parameters, Ugurlu said.
The exoskeleton is still in the first prototype stage, and the researchers said they intend to introduce improved models as their work evolves, such as a model that can help patients with paraplegia walk. “I am specialized in humanoid locomotion and we are going to introduce some of the key techniques from this field to exoskeleton-based paraplegic walking support,” Ugurlu said. “This study is still an ongoing process….”