
The researchers at University of Tokyo and Waseda University used thin strings of lab-grown muscle tissue bundled into rolls to give the fingers enough strength to contract. The multiple muscle tissue actuators (MuMuTAs) are a major development towards biohybrid limbs.
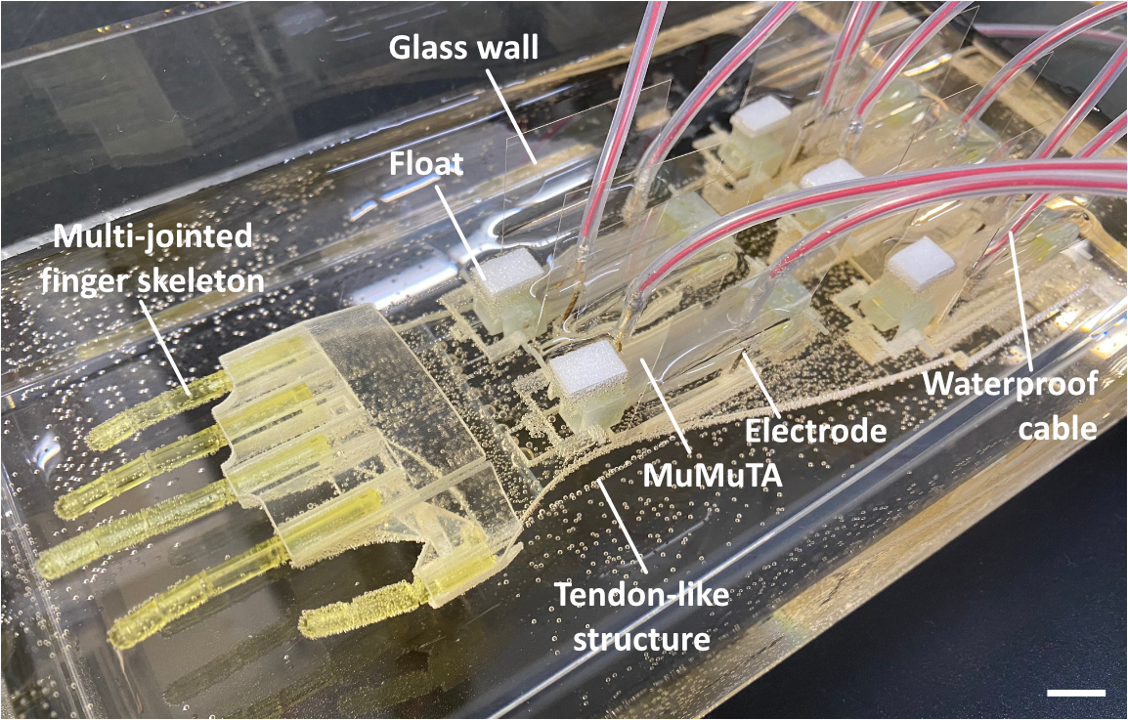
“Our key achievement was developing the MuMuTAs. These are thin strands of muscle tissue grown in a culture medium and then rolled up into a bundle like a sushi roll to make each tendon,” said Shoji Takeuchi, PhD, from the University of Tokyo. “Creating the MuMuTAs enabled us to overcome our biggest challenge, which was to ensure enough contractile force and length in the muscles to drive the hand’s large structure.”
Thick muscle tissue, which is needed to move larger limbs, is difficult to grow in the lab because insufficient nutrients reach the center of the muscle, resulting in tissue loss. However, by using multiple thin muscle tissues bundled together to act as one larger muscle, the team was able to create tendons with enough strength.
The MuMuTAs are stimulated using electrical currents delivered through waterproof cables.
To test the hand’s abilities of the hand, the team manipulated the fingers to form a scissor gesture by contracting the little finger, ring finger and thumb. They also used the fingers to grasp and move the tip of a pipette.
Using real muscle tissue has downsides, however.
“While not entirely surprising, it was interesting that the contractile force of the tissues decreased and showed signs of fatigue after ten minutes of electrical stimulation, yet recovered within just one hour of rest. Observing such a recovery response, similar to that of living tissues, in engineered muscle tissues was a remarkable and fascinating outcome,” said Takeuchi.
Currently the hand must be suspended in liquid so that the anchors connect the muscles to the hand can float without friction, allowing the fingers to move smoothly. However, the team believes that with further development, it will be possible to build a free-moving hand.
Another challenge with the current design is that the fingers cannot be intentionally returned to their straight starting position but do so by floating into place. Adding an elastic material to snap them back into position, or more MuMuTAs on the back of the fingers which contract in the opposite direction, would enable more control over finger movement.
“A major goal of biohybrid robotics is to mimic biological systems, which necessitates scaling up their size. Our development of the MuMuTAs is an important milestone for achieving this,” said Takeuchi. “The field of biohybrid robotics is still in its infancy, with many foundational challenges to overcome. Once these basic hurdles are addressed, this technology could be used in advanced prosthetics, and could also serve as a tool for understanding how muscle tissues function in biological systems, to test surgical procedures or drugs targeting muscle tissues.”
Editor’s note: This story was adapted from materials provided by the University of Tokyo.
The study, “Biohybrid hand actuated by multiple human muscle tissues,” was published in Science Robotics.
{kind=link}