
Japanese researcher Ryuma Niiyama, PhD, is optimistic that with some fine-tuning, “Athlete,” the humanoid, biped robot, will be able to run. Right now, however, all it can do is go a few strides before falling over.
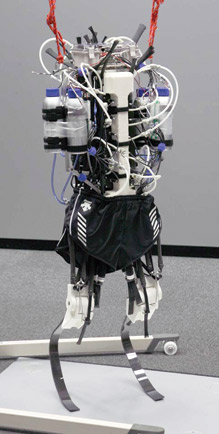
Photograph courtesy of Ryuma Niiyama, PhD, Satoshi Nishikawa, and Yasuo Kuniyoshi, PhD, University of Tokyo, Japan.
Athlete was developed by Ryuma Niiyama while a doctoral candidate at the University of Tokyo, Japan, Department of Mechano-Informatics, with colleague Satoshi Nishikawa, under the supervision of their advisor Professor Yasuo Kuniyoshi. The researchers presented Athlete at the Humanoids 2010 conference in Nashville, Tennessee, December 6-8.
Traditional humanoid robots have rigid legs that run by changing the angle of their joints, which results in a mechanical gait.
According to several papers written by Niiyama, Nishikawa, and Kuniyoshi,* Athlete’s muscle configurations correspond to the human anatomical structure-each leg has seven sets of pneumatic artificial muscles, controlled by custom-made pressure-control valves, that mimic the muscle pairs in human legs. This allows for range of motion and the moment on each joint to be compatible with a human and muscle activation to be patterned on human running. The robot also has sensor feedback components that orient the “body” properly.
Niiyama told IEEE Spectrum blogger Erico Guizzo that human runners with prosthetic feet, similar to South African sprinter Oscar “the Blade Runner” Pistorious, inspired him, which is why the current iteration of Athlete uses prosthetic running blades in place of the “lower leg” pneumatic actuators of earlier versions.
Niiyama is currently a postdoctoral research associate at the Massachusetts Institute of Technology (MIT) Robot Locomotion Group in Cambridge. Niiyama and his colleagues are now focusing their research on better understanding how humans control muscles during tasks like running. They plan an advanced analysis to fine-tune Athlete’s movements and improve the sensor feedback control.
To view a video of Athlete’s development and first attempts at running, visit www.youtube.com/watch?v=bXqUjiNw8fo
* “Design Principle Based on Maximum Output Force Profile for a Muskuloskeletal Robot,” published in Industrial Robot: An International Journal, Vol. 32, No. 3, 2010; “Athlete Robot with Applied Human Muscle Activation Patterns for Bipedal Running,” in Proceedings of the IEEE-RAS International Conference on Humanoid Robots (Humanoids 2010), pp. 498-503, Nashville, Tennessee, December 2010; and “Design of a Musculoskeletal Robot: A Biomechanical Approach,” in Proceedings of the 12th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines, pp. 173-180, Istanbul, Turkey, September 2009.


